Flexible Konfigurationsmöglichkeiten - bessere Anpassung an die Anforderungen der Anwendung
Die Module können in verschiedenen Konfigurationen kombiniert werden, um das kinematische System an die Bedürfnisse der Anwendung anzupassen. Der Einsatz eines Standard-Roboters ist nicht immer erforderlich. Manchmal sind drei oder vier entsprechend konfigurierte Achsen ausreichend, um den Prozess zu bearbeiten.
Gebrauchsfertiges Positionierungssystem, das alle CE-Normen erfüllt
Die Module können als fertiges kinematisches System geliefert werden, das mit einer kompletten Steuerung einschließlich Teach-Pendant ausgestattet ist. Genauso wie fertige Industrie- oder kollaborative Roboter sind sie ein separater Teil der Maschine, der die erforderlichen CE- und Sicherheitsnormen erfüllt (integrierte SAFETY PLC).
Schnelle Inbetriebnahme
Das fertige System lässt sich einfach und schnell in die übrige Produktionslinie integrieren. Das Betriebsprogramm des Roboters wird mit dem Teach-Pendant erstellt, was eine einfache Inbetriebnahme ermöglicht und keine komplexe Programmierung von Antriebsbewegungen erfordert.
Einfache Nachrüstung oder Umrüstung in der Zukunft
Jedes Modul ist eine separate Einheit, wo der Motor und das Getriebe platziert sind. Die Module können mit Bremse, Antriebsregler und anderem Zubehör ausgestattet werden. Sie können mit einer vorgefertigten Steuerung kombiniert werden. Auf diese Weise ist es möglich, den Manipulator umzubauen und die einzelnen Elemente in anderen Applikationen zu verwenden.
Integration mit verschiedenen Steuerungen
Die Module können mit jedem Steuerungssystem betrieben werden, das die Kommunikation mit EtherCAT-Protokoll erlaubt.
Angepasst an Industrie 4.0-Standards
Die digitalen Zwillinge des Modulsystems sind in der von uns zur Verfügung gestellten Simulationssoftware SIMULTUS verfügbar, wo Sie mit deren verschiedenen Konfigurationen experimentieren können. Das Steuerprogramm kann in der Simulation erstellt und das fertige und getestete Programm auf das Gerät kopiert werden. Das System kann auch mit dem OmniMES-System zur Maschinenüberwachung und Produktionssteuerung betrieben werden.
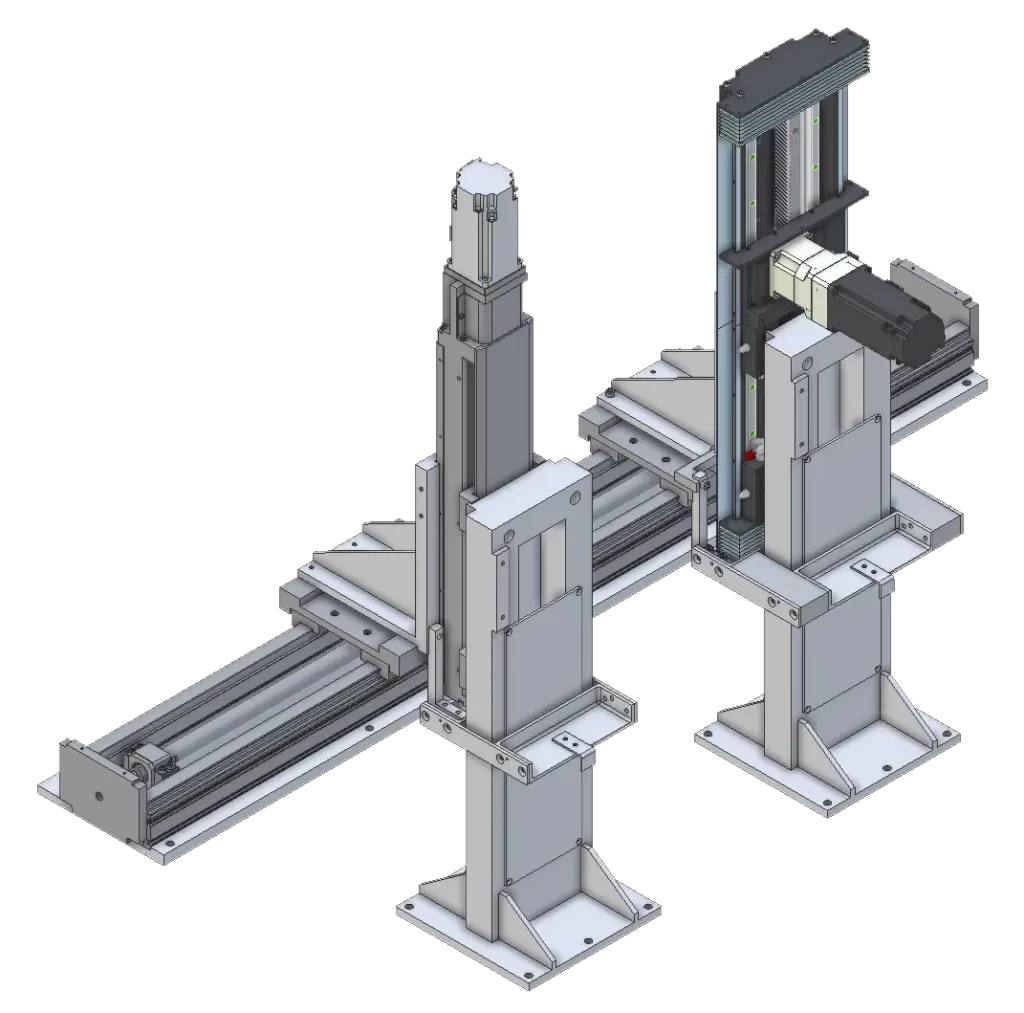
Beispiele für modulare Roboteranwendungen
Aufbau eines modularen Systems
Auswahl an modularen Roboteroptionen
Ich brauche einzelne Module
Unser Angebot umfasst schneller verfügbare Standardmodule. Diese Module können auf Ihre Anwendung zugeschnitten werden, indem Sie verschiedene Ausführungsoptionen wählen.
Sie können die Liste der verfügbaren Optionen auf der Seite mit den Bezeichnungscodes einsehen. Lassen Sie sich von unseren Spezialisten bei der Auswahl der richtigen Module für Ihre Anwendung beraten.
Ich brauche ein vorgefertigtes Standard-Set
Die Palette unserer Standard-Sets wird ständig erweitert. In unserem Angebot gibt es Roboter mit 2 bis 6 Achsen und einem fertigen Steuerungssystem mit Teach-Pendant. Die Sets entsprechen den CE-Normen und sind mit entsprechenden Sicherheitssystemen wie SafetyPLC ausgestattet.
Ich brauche ein maßgefertigtes Set
Wir liefern betriebsbereite, sicherheitskonforme Kinematiken hergestellt nach Ihren Vorgaben. Sie können mit einem Steuerungssystem und einem Teach-Pendant ausgestattet werden.
Bitte kontaktieren Sie unseren technischen Support für weitere Informationen.
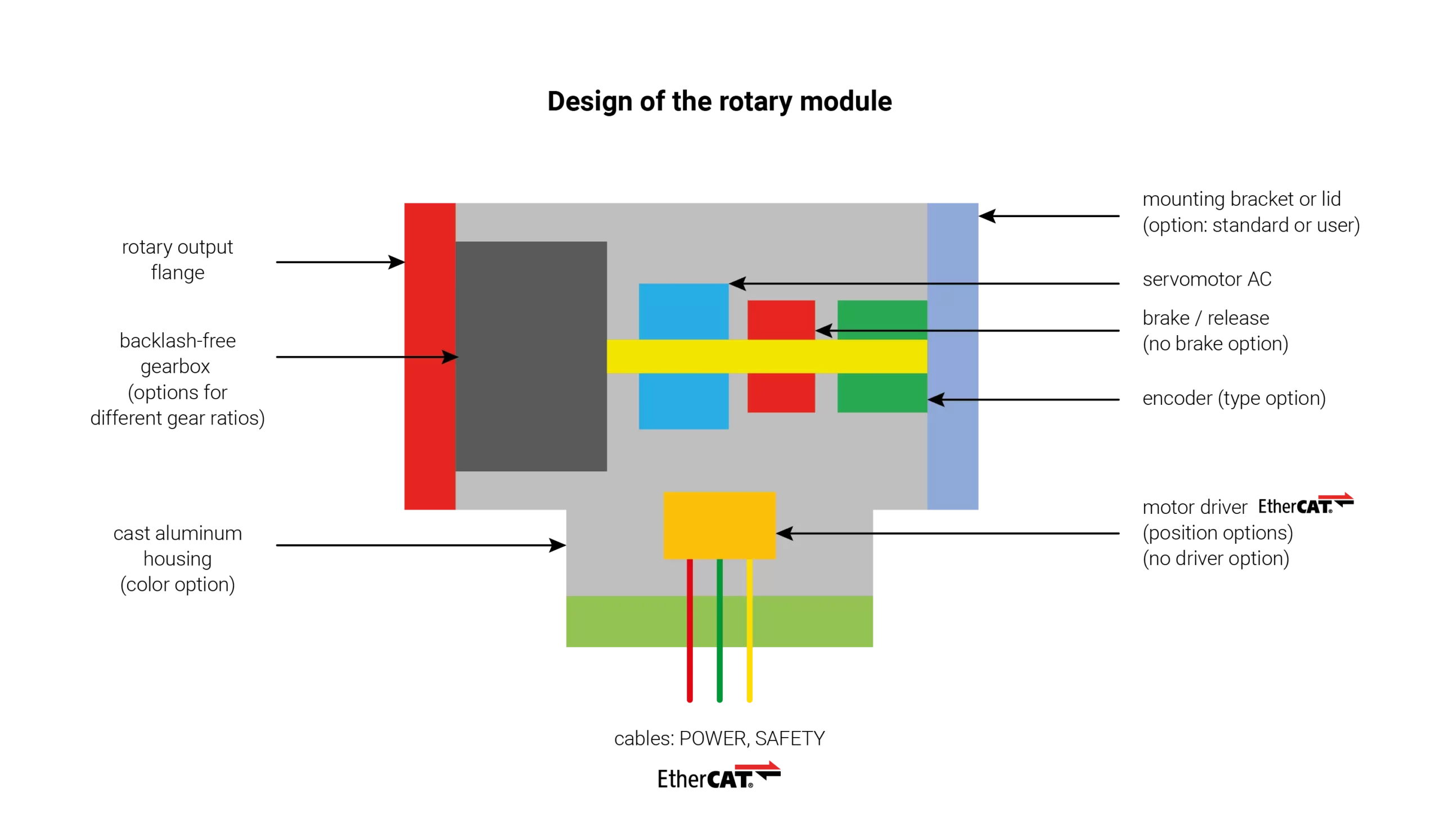
Konstruktion des Drehmoduls
Dies ist kein typischer SCARA-Roboter
Dies ist kein typischer SCARA-Roboter. Durch die Verwendung des direkten Linear-Dreh-Antriebs LINMOT PR02 und dessen Verbindung mit dem modularen Roboter Modubot erhalten wir ein Gerät, das ähnlich wie ein SCARA-Roboter funktioniert.
Durch die Kombination des Linearantriebs mit dem modularen Roboter können die beiden Endachsen mit sehr hoher Geschwindigkeit und Präzision gesteuert werden, während Kraft- und Drehmomentkontrolle erhalten bleiben. Dieses Design eignet sich perfekt für Anwendungen wie das Anziehen von Muttern oder das Eindrehen von Schrauben.
Kontaktieren Sie uns für Einzelheiten zu diesem Produkt – Formular unten auf der Seite.
Spezifikation - 1-Achsen-Drehmodule
Grundmodelle und technische Daten
Drehbare Module
MR-R1
MR-R2
MR-R3
MR-R4
MR-R5
Gehäuse
S 110
S 110
S 110
S 115
S 130
Getriebeübersetzung
50
80
100
5
80
Nenndrehmoment [Nm]
14,5
23,2
29
33
52,8
Nenndrehzahl [°/s]
420
260
216
316
198
Drehzahl max. [°/s]
420
260
216
420
265
Drehbare Module
MR-R6
MR-R7
MR-R8
MR-R9
Gehäuse
S 130
S 130
S 130
S 169
Getriebeübersetzung
120
50
80
120
Nenndrehmoment [Nm]
79,2
54
86,4
129,6
Nenndrehzahl [°/s]
132
415
259
173
Drehzahl max. [°/s]
175
420
263
175
Die Tabelle zeigt die Parameter der Standardmodule MR-R1~MR-R9. Es sind auch Module mit anderen Parametern erhältlich (siehe Tabelle BEZEICHNUNGSCODES). Für Details und Verfügbarkeit von Optionen wenden Sie sich bitte an unsere technische Vertriebsberatung.
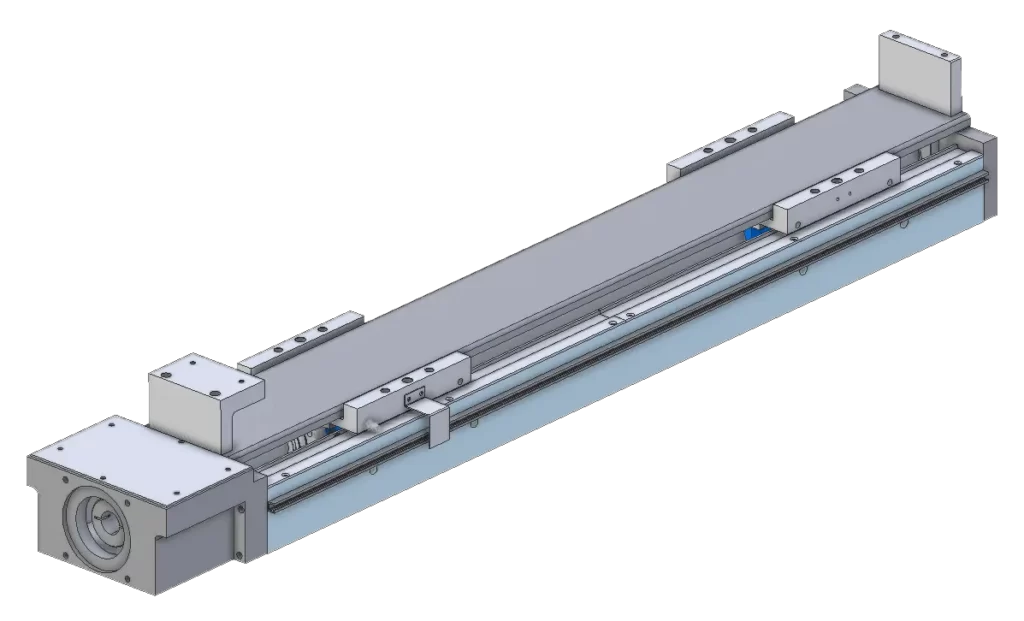
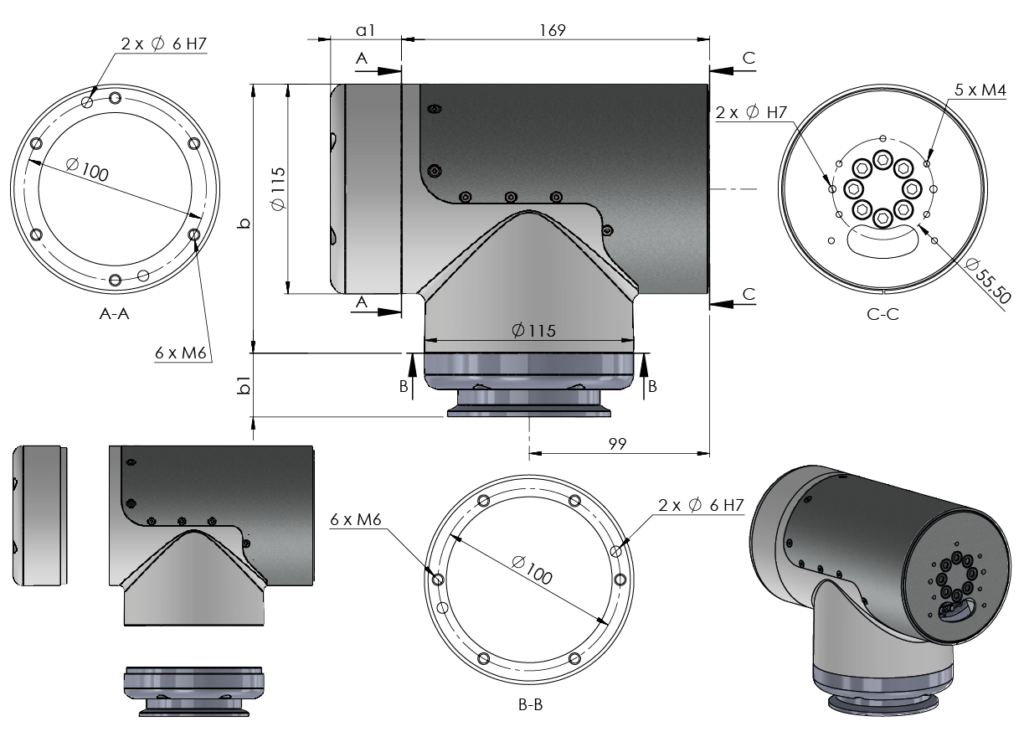
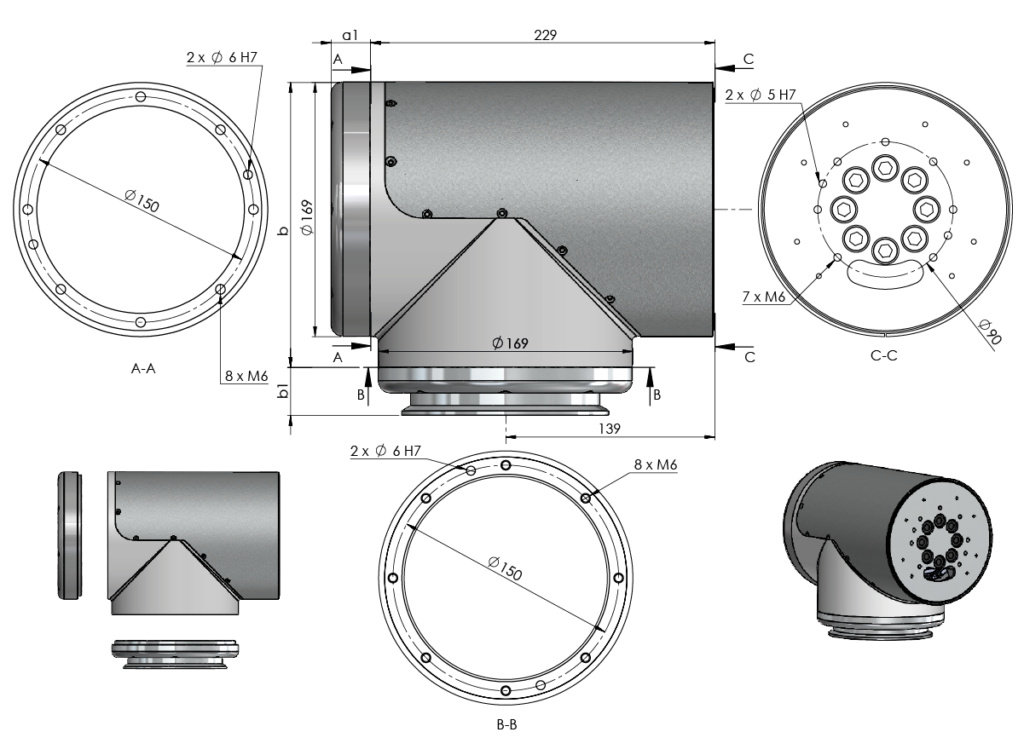
Je nach Ausführung der kinematischen Kette können die Module mit dem Montageflansch (grün) in einer Linie mit der Rotorachse (Typ F0) oder im Winkel von 90 Grad (Typ F90) montiert werden. Der Flansch kann standardmäßig oder nach Maß gefertigt werden.
Position des Servomotor-Reglers
Unabhängig von der Position und der Art des Montageflansches kann die Position des Servomotor-Reglers gewählt werden. Optional kann das Modul auch ohne einen, im Gehäuse montierten Antriebsregler ausgestattet sein. In diesem Fall muss sich der Antriebsregler außerhalb des Moduls befinden.
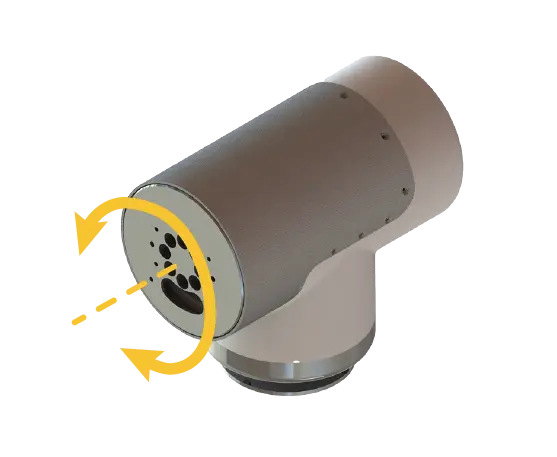
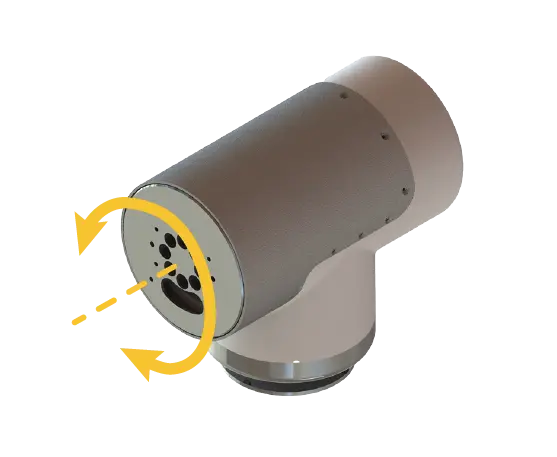
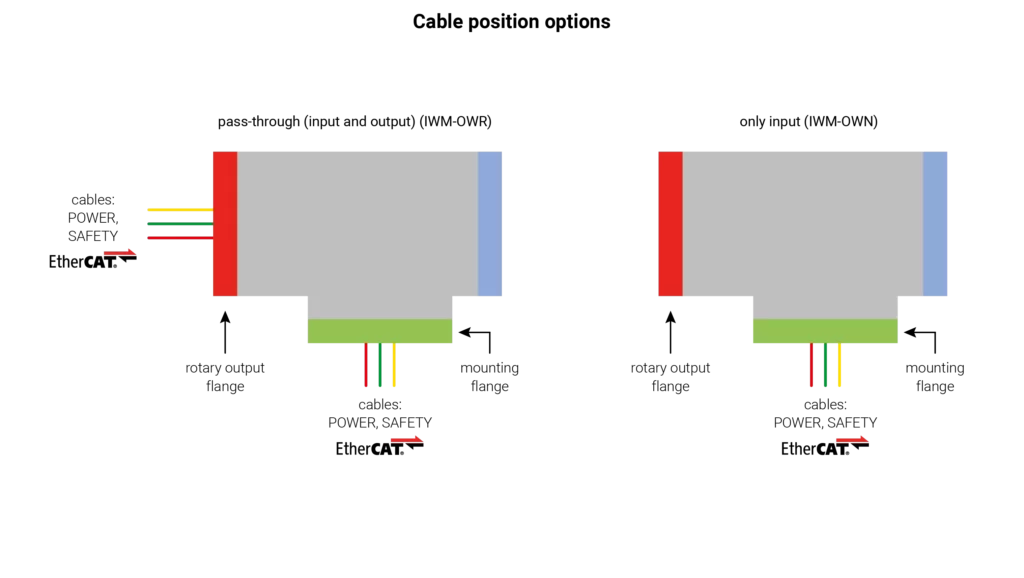
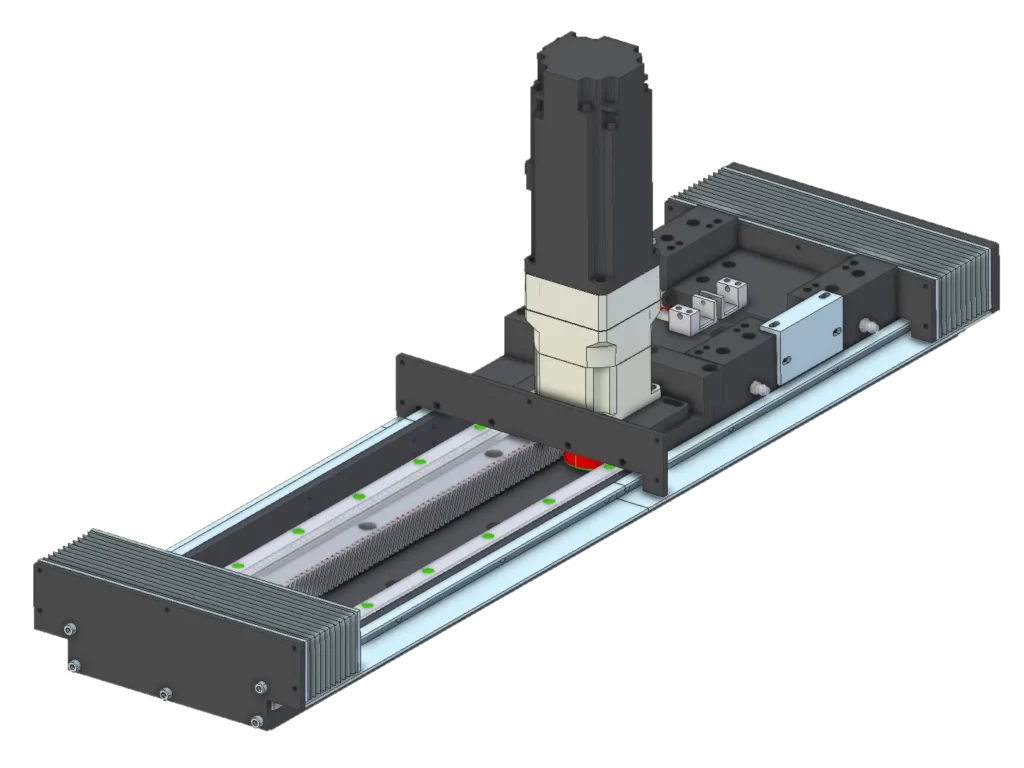
Beispieloptionen für Kabelpositionierung
Wenn das Modul im Zentrum der kinematischen Kette liegt, können die Leitungen (Eingang und Ausgang) aus dem Montageflansch und dem Abtriebsflansch herausgeführt werden. Wenn keine weiteren Module an das betreffende Modul angeschlossen sind, können die Eingangsleitungen auch nur aus dem Montageflansch herausgeführt werden. Die Leitungen können auch aus den Abdeckungen herausgeführt werden. Andere Möglichkeiten der Kabelverlegung gemäß der Tabelle der Bezeichnungscodes. Für Details und Verfügbarkeit von Optionen wenden Sie sich bitte an unsere technische Vertriebsberatung.
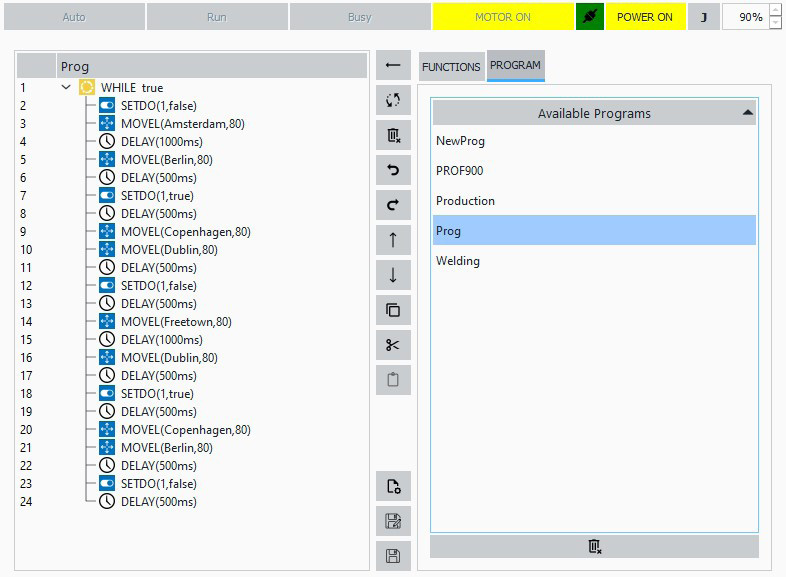
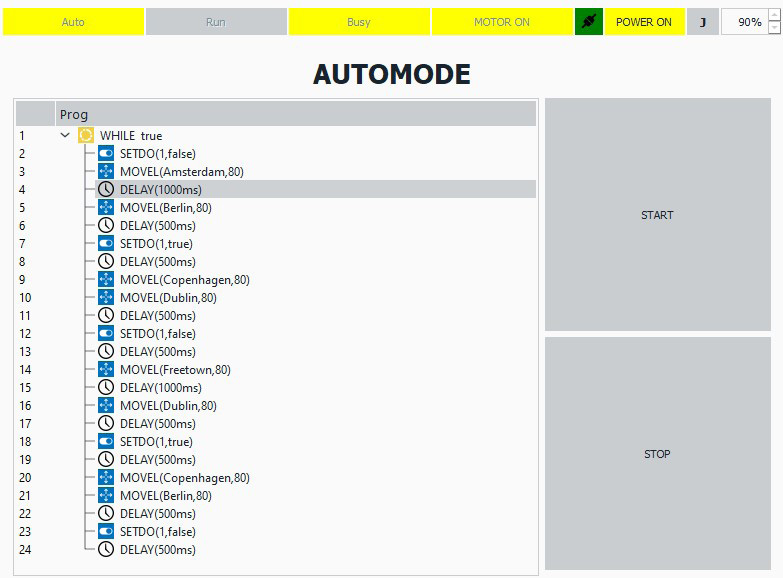
Fernbedienung (Teach-Pendant) für modulare Roboter
Teach Pendant
Das Teach-Pendant wird zur Programmierung der Bewegungen des Roboters (Manipulators) verwendet. Damit lassen sich sowohl einfache als auch sehr fortgeschrittene Roboterprogramme erstellen. Wie bei Standard-Robotern können Positionen gespeichert und Programme für Bewegungen zwischen den gespeicherten Punkten sowie für Übergangsbedingungen erstellt werden. Außerdem kann der Roboter manuell gesteuert werden. Die Programmierung ist intuitiv und erfordert keine fortgeschrittenen Programmierkenntnisse.
Der fertige Controller erfüllt alle mit Robotern verbundenen Sicherheitsanforderungen (einschließlich der eingebauten SAFETY PLC). Eingebaute digitale I/Os. EtherCAT-Protokoll.
Schnittstellen:
Ethernet
USB
Anschluss für Modular-Roboter
Anschluss für Teach-Pendant
Stromversorgung 230V
digitale Ein-/Ausgänge (DI/DO)
analoge Eingänge/Ausgänge (AI/AO)
Taster und Schalter:
Not-Aus
Umschalter AUTO/MANUAL (Schlüsselschalter)
Hauptschalter ON/OFF
Tasten für START/STOP, POWER ON/OFF
Simultus - 3D-Software-Tool
Die kostenlose Software ermöglicht es, das System in einer virtuellen Version auf einem PC in 3D zu testen, ohne die Hardware kaufen zu müssen (digitaler Zwilling). Der Import von 3D-Körpern aus CAD-Programmen ermöglicht es Ihnen, Ihre eigene Produktionsstation zu testen. Moderne Software ermöglicht Simulationen mit Hilfe der Festkörperphysik.
Wir konstruieren, fertigen und liefern einsatzbereite, sicherheitskonforme und anwendungsspezifische Kinematiksysteme nach Kundenwunsch. Für Details wenden Sie sich bitte an unsere technischen Verkaufsberater.
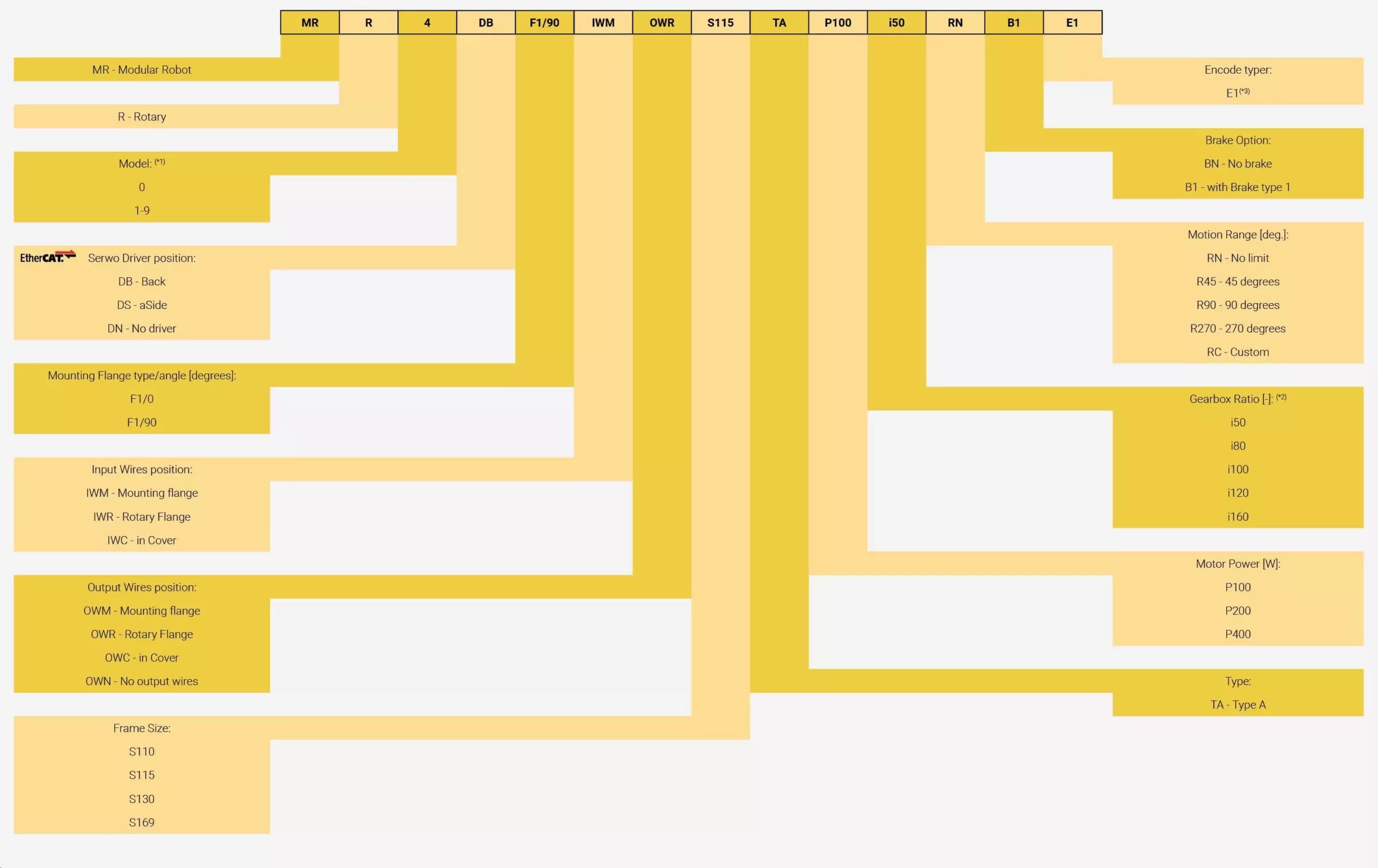
Bezeichnungscodes - Drehmodule
Modulrahmengröße
Verhältnisoption
Getriebegröße
MR-R-S110
50, 80, 100, 120
17
MR-R-S115
50, 80, 100, 120, 160
20
MR-R-S130
50, 80, 100, 120, 160
25
MR-R-S169
50, 80, 100, 120, 160
32
*1 - Standardmodell-Bezeichnung von 1 bis 9, für andere Optionen '0' eingeben *2 - Tabelle der möglichen Getriebeübersetzungen für eine bestimmte Gehäusegröße Sxxx auf der rechten Seite *3 - Multiturn Absolut-Drehgeber 65536 ppr